
2026年6月2日(火)に株式会社Enacticは、NVIDIAが提供するヒューマノイドロボット向け基盤モデルの最新版「NVIDIA Isaac GR00T N1.7」を用いた、介護領域における実用性検証を日本で初めて開始したことを発表した。
NVIDIAとのコラボレーションを通じ、介護現場をはじめとする生活空間で求められる多様な作業へのヒューマノイドロボット実装を進める。
 深刻化する介護人材不足に、フィジカルAIで挑む
深刻化する介護人材不足に、フィジカルAIで挑む
日本は世界で最も高齢化が進んだ国の一つであり、介護人材の需給ギャップは深刻さを増している。介護現場は環境が施設ごとに異なり、扱う物や人の動きも一定ではないため、AIにとって難度の高い領域だ。
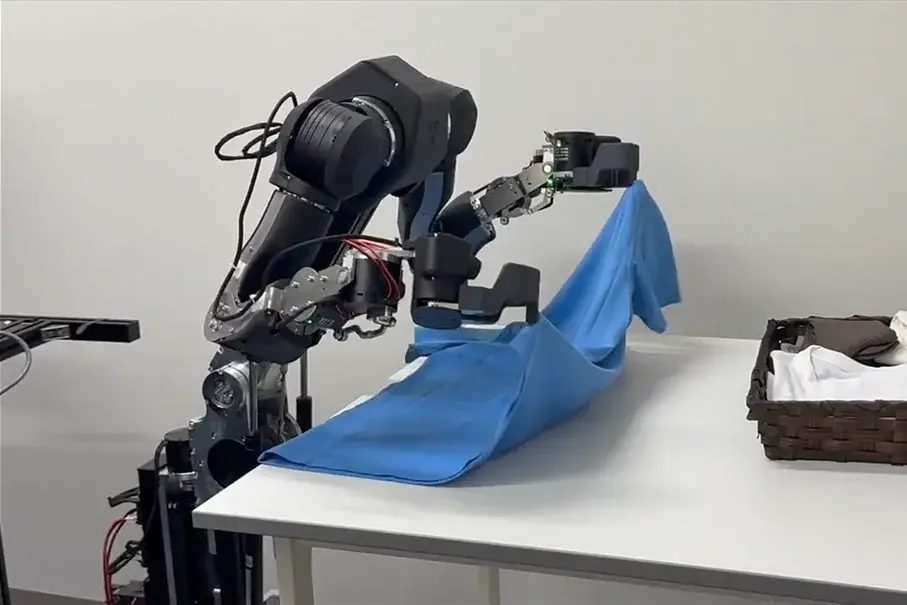
Enacticは90社以上の介護事業者との提携を通じて業務要件の知見を蓄積しており、同社のオープンソース双腕ロボット「OpenArm 2.0」はロボット基盤モデルの実機評価プラットフォームとしてグローバルに活用されている。こうした強みを生かし、複雑な環境適応や非定型作業における自律性の向上を図る。
3つの軸で開発を推進
本取り組みでは以下の3つの軸で開発を進める。
1.介護現場のサンプルタスクにおけるロボット基盤モデルの実用性検証と最適化
実際の介護業務から抽出した代表的なタスクを対象に、タスクの成功率・汎化性・安全性などの観点から課題を特定し、追加学習やデータ拡充を通じてモデルを介護領域に最適化する。
2.自社プラットフォームでの実機検証
最適化したモデルをヒューマノイドプラットフォームに統合し、シミュレーションと実機の差分を埋めながら完成度を高める。
3.介護施設環境における実機検証
協力施設において実際の生活空間に近い環境での検証を行い、人と空間を共有する条件下でのモデルとプラットフォームの挙動を確認する。
NVIDIAのフルスタックテクノロジを活用
プロジェクトでは、基盤モデルにNVIDIA Isaac GR00T Nシリーズ、シミュレーションフレームワークにNVIDIA Isaac SimとIsaac Lab、世界基盤モデルにNVIDIA CosmosおよびDreamZero、モデル学習にNVIDIA DGX H100、エッジ推論にNVIDIA Jetson Thorを活用する。
NVIDIA Isaac GR00T N1.7は商用利用が可能な最新モデルで、人間の一人称視点映像を用いた大規模事前学習やクロスエンボディメント転移を可能にする行動空間設計などにより、少量のデータで多様なタスクへの適応を実現する設計となっている。
Enactic代表取締役の山本泰豊氏は「NVIDIAとコラボレーションしながら開発ができるようになったことで、人が暮らす空間で本当に役に立つヒューマノイドの実現に向けた歩みを大きく加速できると考えている」とコメントしている。